Компьютерное зрение в беспилотных автомобилях. Часть 2. Как видит Tesla?
Современные беспилотные автомобили оснащены множеством всевозможных датчиков, которые позволяют им “видеть” и достаточно неплохо ориентироваться на дороге. Рассмотрим их подробнее.
Камеры
Без них беспилотному автомобилю не обойтись. Работает это так: камеры получают картинку, алгоритмы обрабатывают и распознают ее. Современные системы отлично справляются с распознаванием знаков и разметки и неплохо классифицируют объекты по категориям “взрослый — ребенок — собака- велосипедист — легковушка-грузовик”. Плюс камеры доступны по цене и хорошо фиксируют поперечное движение (когда человек перебегает дорогу, машина его отлично видит).
Минусы в том, что камеры плохо фиксируют расстояния до предметов, скорость сближения и движения объектов, не всегда различают объекты при плохой видимости и иногда срабатывают с задержкой.

Радары
Камеры в беспилотниках — самый дешевый и надежный способ получения информации об окружающих объектах, но в силу несовершенства систем распознавания изображений, пока далеко не самый лучший.
Радары за счет радиоволн позволяют точно определить дистанцию до препятствий и их скорость. Главный плюс в том, что радары замечают препятствия в любых погодных условиях и любой видимости, точно фиксируют скорость и расстояния и практически мгновенно обрабатывают информацию. Но установка их — удовольствие не из дешевых. Плюс радары не могут классифицировать предметы, а дальность их действия сильно зависит от угла обзора.
В настоящий момент радары, как и камеры, есть на всех беспилотных автомобилях. Без них не обойтись. Чего не скажешь о следующем инструменте машинного видения.
Лидары
Способны фиксировать расстояния до объектов, направляя вокруг себя лазерные лучи. На выходе получается массив точек с расстояниями до них. Лидары, в отличие от радаров, способны увидеть форму и габариты предметов с высокой точностью. Но минус в том, что просматривать один и тот же участок дороги они могут только один раз в 2-3 секунды. К тому же они очень дорогие, поэтому Tesla, например, их не использует вовсе. Это нишевое решение, которое не подходит для серийного выпуска автомобилей.
Ультразвуковые датчики
Таким устройствами оснащены почти все модели беспилотных автомобилей и не только. Однако они видят окружающие объекты на расстоянии не более нескольких метров и не определяют скорость и точное расположение объекта в пространстве. Таким образом, ультразвуковые датчики не дают достаточно достоверную информацию, зато работают оперативно и доступны по цене.
ИК-камеры
Некоторые беспилотные автомобили оснащены инфракрасными камерами, позволяющими различать живность и людей при любом освещении. Но это решение еще более дорогое, чем установка лидаров, и при этом имеет довольно узкую сферу применения.
У разработчиков беспилотных автомобилей нет однозначного ответа на вопрос, какие приспособления нужны, а без каких можно обойтись. Tesla делает упор на серийный выпуск своих автомобилей, поэтому больше ориентируется на камеры и радары.
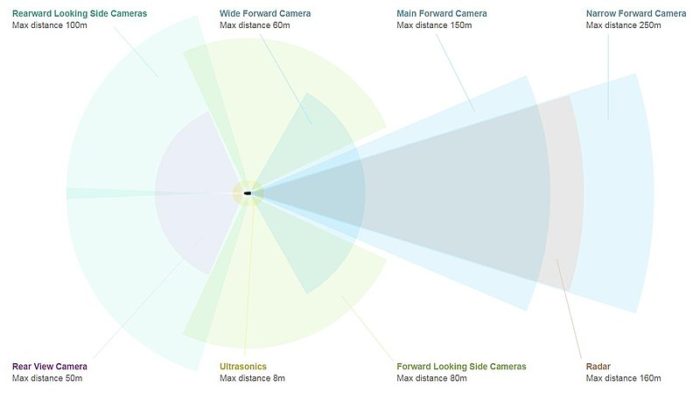
Илон Маск исходит из убеждения, что человек управляет автомобилем при помощи двух глаз, а значит и робот может делать точно также. Камеры в Tesla обеспечивают полный обзор на 360 градусов. Две камеры спрятаны в центральных стойках, ещё две – за арками передних колёс, еще одна – сзади над номерным знаком, и три – под лобовым стеклом и перед зеркалом заднего вида.
Другие производители считают, что так как машинное зрение еще недостаточно совершенно, нужны лидары и другие приспособления, которые сделают автопилот более безопасным. В итоге такие модели получаются недоступными для массового применения, что расходится с этической, социальной и, самое главное, с экономической составляющей беспилотных автомобилей. Дорогостоящую разработку автопилота в настоящий момент не окупят и 1000 проданных машин.
О безопасности и социальном аспекте развития беспилотных автомобилей будет следующая статья.
We are continuing to talk about autonomous cars and devices, which allow them to navigate on the road and «see» surrounding objects.