What are modern facial recognition technologies based on?
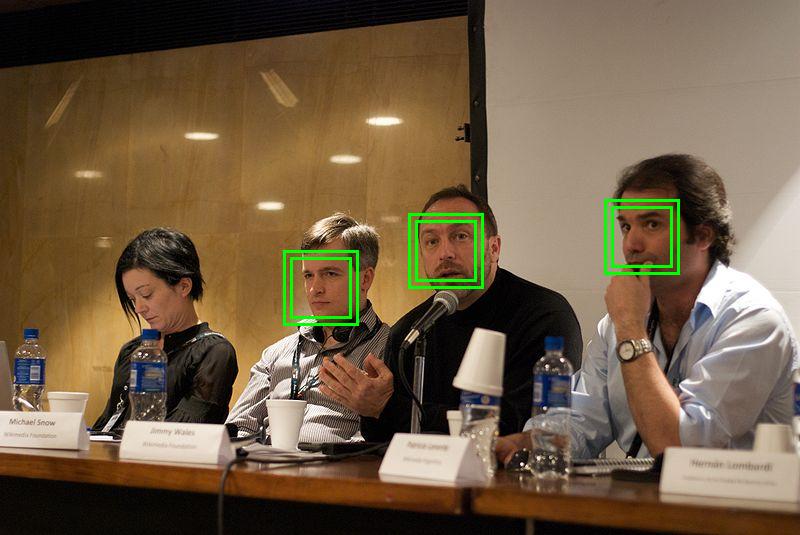
One of the directions of computer vision development is face recognition technology. Currently, there is a huge variety of facial recognition systems, ranging from the face localization technology in smartphones to complex systems that can find a person in a crowd. In this article we will discuss the principles on which modern facial recognition systems are based.
Read more
0